3 インバータによる減速
1)誘導電動機をインバータ駆動する時の加減速時間
2π x(JM+JL)x ΔN
加速時間Tα=―――――――――――――――――――――――――――― (秒)
60 x(TM-TL)
2π x(JM+JL)x ΔN
減速時間Tβ=―――――――――――――――――――――――――――― (秒)
60 x(TB+TL)
JM:モータ慣性モーメント(Kg.m2)
JL:負荷慣性モーメントーモータ軸換算(Kg.m2)
TL:負荷トルク(N.m)
TM:モータ定格トルク(N.m)x 1.1 V/f制御時
; x 1.2 ベクトル制御時
TB:0.2 x モータ定格トルク(N.m)
ΔN:加減速前後の回転速度差です(min-1)
SI単位(国際単位)
2)減速時間―例(図10)
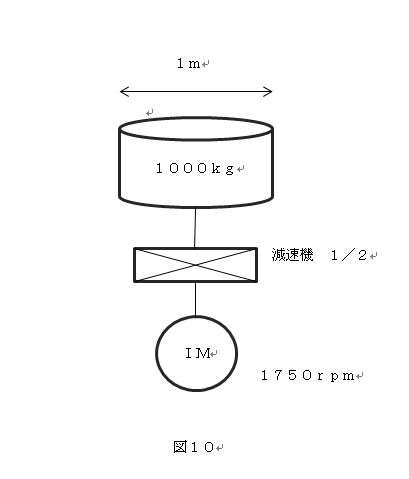
Jm(負荷軸慣性モーメント)
=1/8WD2=1/8・1000・12=125(Kg・m2)
JL=Jm x(1/2)2=31(Kg・m2)
50秒で加速が完了するとすれば、
2π x JL x ΔN
Ta(加速トルク)=――――――――――――――――――――
60 x tα
2π x 31 x 1750
=―――――――――――――――――――――――
60 x 50
=114(N.m)
TL(負荷トルク)は加速分の7%とする(推定)
TL=Ta x 0.07
=114 x 0.07=8(N.m)
3)フリーラン停止時の減速時間
負荷トルクだけがブレーキ力となって停止
2π x JL x ΔN
tβ=――――――――――――――――――――――
60 x TL
2π x 31 x 1750
=――――――――――――――――――――――――――
60 x 8
=710(秒)
4)インバータ使用時の減速時間
2π x Ta x NM
P0(負荷動力、所要動力)=――――――――――――――――――――――
60 x 103
=20.8(KW)
モータ選定
20.8<22.0 22KW選定
22KWモータ(定トルク 1:10)のJMはカタログ値より
JM=0.220(Kg.m2)
TM(モータ定格トルク)は
60 x PM x 103
TM=――――――――――――――――――――――――
2π x NM
60 x 22 x 103
=――――――――――――――――――――――――
2π x 1750
ベクトル制御時 TM、=TM x 1.2=144(N.m)
TB=0.2 x TM、
=0.2 x 144=28.8(N.m)
よって減速時間は
2π x (JM+JL) x ΔN
tβ=―――――――――――――――――――――――――――
60 x (TB+TL)
2π x (0.220+31)x 1750
=―――――――――――――――――――――――――――――――――――――
60 x (28.8+8)
=155(秒)
前へ
次へ